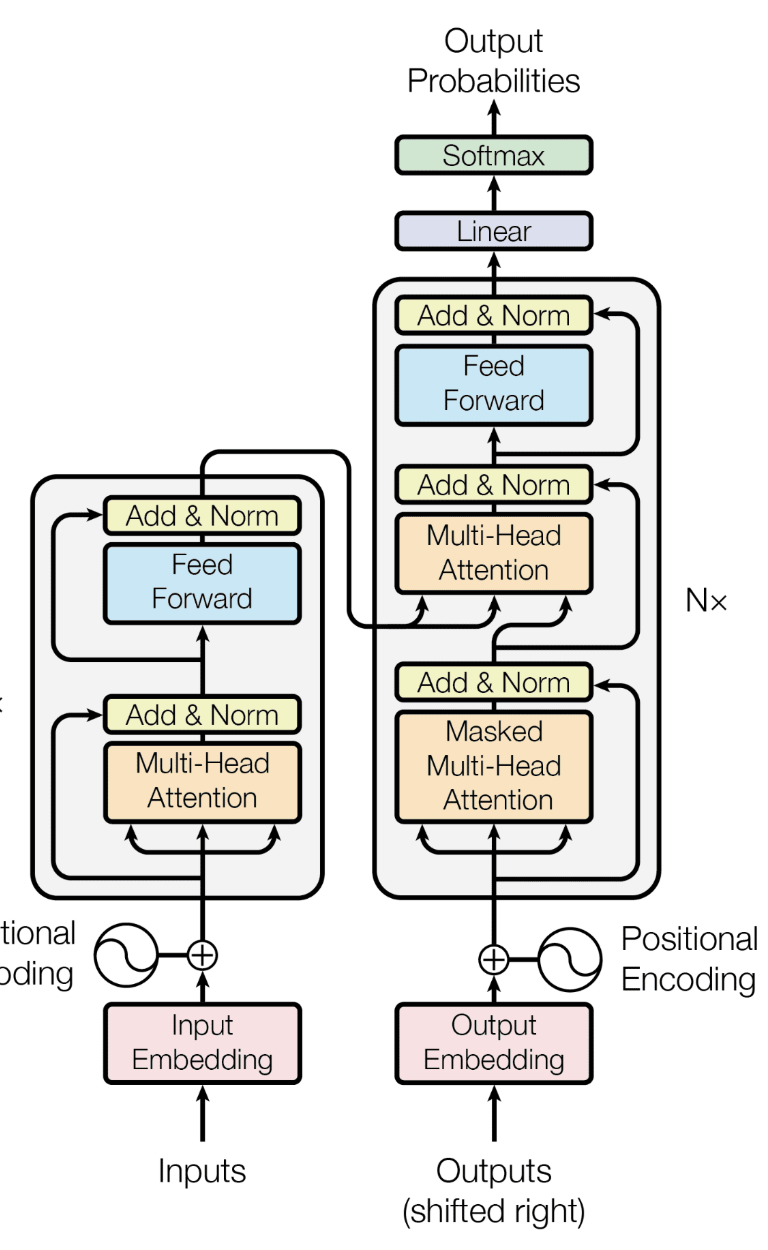
s-motf: Latent World-Action Model (L-WAM)
2026Architected a 50 Hz proprioceptive quadruped controller (Unitree Go1, MuJoCo) around a Mixture-of-Transformers backbone with a 3-step rectified flow-matching action head and prior/posterior latent-plan alignment. Distilled three PPO specialists — locomotion, hind-leg balance, fall recovery — into a single command-conditioned policy retaining 83–96% of specialist return, where an equal-capacity MLP baseline collapsed on the multimodal skill (4.7× lower return, 4.1× shorter survival).
PythonPyTorchMuJoCoUnitree Go1PPOFlow MatchingMixture-of-TransformersWorld Models